Unsupervised Domain Adaptation of Virtual and Real Worlds for Pedestrian Detection
2012·,,
David Vázquez
Antonio M López
Daniel Ponsa
Abstract
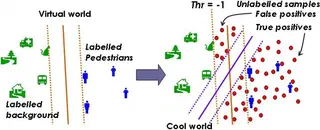
Vision-based object detectors are crucial for different applications. They rely on learnt object models. Ideally, we would like to deploy our vision system in the scenario where it must operate. Then, the system should self-learn how to distinguish the objects of interest, i.e., without human intervention. However, the learning of each object model requires labelled samples collected through a tiresome manual process. For instance, we are interested in exploring the self-training of a pedestrian detector for driver assistance systems. Our first approach to avoid manual labelling consisted in the use of samples coming from realistic computer graphics, so that their labels are automatically available. This would make possible the desired self-training of our pedestrian detector. However, between virtual and real worlds it may be a dataset shift. In order to overcome it, we propose the use of unsupervised domain adaptation techniques that avoid human intervention during the adaptation process. In particular, this paper explores the use of the transductive SVM (T-SVM) learning algorithm in order to adapt virtual and real worlds for pedestrian detection.
Type
Publication
International Conference on Pattern Recognition (ICPR)