Learning Appearance in Virtual Scenarios for Pedestrian Detection
2010·,,,
Javier Marin
David Vázquez
Daniel Gerónimo
Antonio M. López
Abstract
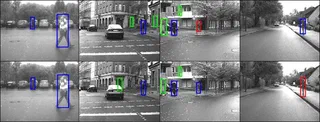
Detecting pedestrians in images is a key functionality to avoid vehicle-to-pedestrian collisions. The most promising detectors rely on appearance-based pedestrian classifiers trained with labelled samples. This paper addresses the following question: can a pedestrian appearance model learnt in virtual scenarios work successfully for pedestrian detection in real images? The experiments suggest a positive answer, which is a new and relevant conclusion for research in pedestrian detection. More specifically, training sequences are recorded in virtual scenarios and then appearance-based pedestrian classifiers are learnt using HOG and linear SVM. These classifiers are tested in a publicly available dataset provided by Daimler AG for pedestrian detection benchmarking.
Type
Publication
Computer Vision and Pattern Recognition (CVPR)