Embedded Real-Time Stereo Estimation via Semi-Global Matching on the GPU
2016·,,,,,
Daniel Hernández Juárez
Alejandro Chacón
Antonio Espinosa
David Vázquez
Juan Carlos Moure
Antonio M López
Abstract
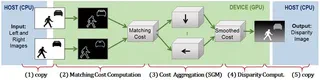
Dense, robust and real-time computation of depth information from stereo-camera systems is a computationally demanding requirement for robotics, advanced driver assistance systems (ADAS) and autonomous vehicles. Semi-Global Matching (SGM) is a widely used algorithm that propagates consistency constraints along several paths across the image. This work presents a real-time system producing reliable disparity estimation results on the new embedded energy-efficient GPU devices. Our design runs on a Tegra X1 at 42 frames per second (fps) for an image size of 640x480, 128 disparity levels, and using 4 path directions for the SGM method.
Type
Publication
International Conference on Computational Science (ICCS)