Multiview Random Forest of Local Experts Combining RGB and LIDAR Data for Pedestrian Detection
2015·,,,,,
Alejandro González
Gabriel Villalonga
Jiaolong Xu
David Vázquez
Jaume Amores
Antonio M López
Abstract
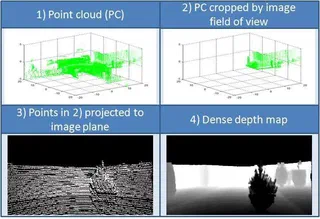
Despite recent significant advances, pedestrian detection continues to be an extremely challenging problem in real scenarios. In order to develop a detector that successfully operates under these conditions, it becomes critical to leverage upon multiple cues, multiple imaging modalities and a strong multi-view classifier that accounts for different pedestrian views and poses. In this paper, we provide an extensive evaluation that gives insight into how each of these aspects (multi-cue, multimodality and strong multi-view classifier) affect performance both individually and when integrated together. In the multi-modality component we explore the fusion of RGB and depth maps obtained by high-definition LIDAR. The resulting detector is built upon very simple blocks that are easy to implement and computationally efficient, and achieves competitive performance on the KITTI benchmark.
Type
Publication
Intelligent Vehicles Symposium (IV)